

The idea of
wise roadways is not new. It involves initiatives like website traffic lights that routinely adjust their timing based mostly on sensor information and streetlights that instantly modify their brightness to minimize electrical power intake. PerceptIn, of which coauthor Liu is founder and CEO, has demonstrated at its have examination keep track of, in Beijing, that streetlight management can make targeted visitors 40 p.c extra efficient. (Liu and coauthor Gaudiot, Liu’s former doctoral advisor at the College of California, Irvine, often collaborate on autonomous driving jobs.)
But these are piecemeal changes. We suggest a significantly a lot more bold method that combines clever roads and intelligent motor vehicles into an integrated, fully intelligent transportation technique. The sheer sum and accuracy of the combined details will allow for these kinds of a procedure to achieve unparalleled ranges of safety and effectiveness.
Human motorists have a
crash amount of 4.2 mishaps per million miles autonomous cars ought to do considerably much better to attain acceptance. On the other hand, there are corner instances, this sort of as blind spots, that afflict equally human drivers and autonomous cars and trucks, and there is at present no way to tackle them devoid of the aid of an intelligent infrastructure.
Putting a lot of the intelligence into the infrastructure will also lessen the price tag of autonomous autos. A entirely self-driving motor vehicle is nevertheless very pricey to make. But steadily, as the infrastructure will become far more powerful, it will be attainable to transfer extra of the computational workload from the motor vehicles to the roads. Ultimately, autonomous vehicles will require to be outfitted with only primary notion and manage capabilities. We estimate that this transfer will decrease the price of autonomous automobiles by much more than half.
Here’s how it could do the job: It’s Beijing on a Sunday morning, and sandstorms have turned the sunshine blue and the sky yellow. You’re driving by way of the city, but neither you nor any other driver on the road has a clear perspective. But every automobile, as it moves together, discerns a piece of the puzzle. That facts, put together with facts from sensors embedded in or in close proximity to the road and from relays from temperature products and services, feeds into a distributed computing program that works by using synthetic intelligence to assemble a solitary product of the atmosphere that can recognize static objects along the road as properly as objects that are relocating alongside just about every car’s projected path.
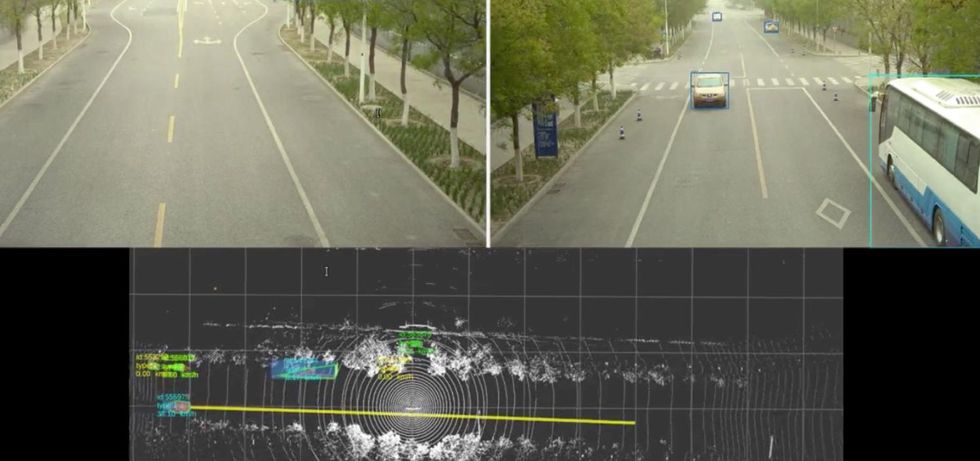 The self-driving car or truck, coordinating with the roadside method, sees ideal by way of a sandstorm swirling in Beijing to discern a static bus and a shifting sedan [top]. The procedure even indicates its predicted trajectory for the detected sedan by way of a yellow line [bottom], properly forming a semantic large-definition map.Shaoshan Liu
The self-driving car or truck, coordinating with the roadside method, sees ideal by way of a sandstorm swirling in Beijing to discern a static bus and a shifting sedan [top]. The procedure even indicates its predicted trajectory for the detected sedan by way of a yellow line [bottom], properly forming a semantic large-definition map.Shaoshan Liu
Correctly expanded, this strategy can avoid most mishaps and site visitors jams, troubles that have plagued highway transportation given that the introduction of the auto. It can supply the targets of a self-sufficient autonomous car or truck with no demanding extra than any just one auto can provide. Even in a Beijing sandstorm, just about every man or woman in every motor vehicle will get there at their location safely and securely and on time.
By placing with each other idle compute electricity and the archive of sensory knowledge, we have been equipped to make improvements to effectiveness without the need of imposing any further burdens on the cloud.
To day, we have deployed a design of this program in many metropolitan areas in China as perfectly as on our exam observe in Beijing. For occasion, in Suzhou, a town of 11 million west of Shanghai, the deployment is on a general public road with a few lanes on each and every aspect, with stage one particular of the job covering 15 kilometers of freeway. A roadside process is deployed each and every 150 meters on the road, and every single roadside technique consists of a compute unit outfitted with an
Intel CPU and an Nvidia 1080Ti GPU, a collection of sensors (lidars, cameras, radars), and a communication part (a roadside device, or RSU). This is mainly because lidar supplies a lot more exact perception in contrast to cameras, primarily at night. The RSUs then communicate directly with the deployed automobiles to aid the fusion of the roadside data and the car or truck-aspect info on the car.
Sensors and relays alongside the roadside comprise just one half of the cooperative autonomous driving system, with the components on the vehicles on their own producing up the other 50 %. In a usual deployment, our model employs 20 vehicles. Each individual vehicle bears a computing program, a suite of sensors, an engine manage unit (European), and to hook up these elements, a controller spot network (CAN) bus. The street infrastructure, as explained above, is made up of equivalent but more superior gear. The roadside system’s high-conclude Nvidia GPU communicates wirelessly by using its RSU, whose counterpart on the vehicle is identified as the onboard unit (OBU). This again-and-forth interaction facilitates the fusion of roadside facts and automobile knowledge.
 This deployment, at a campus in Beijing, consists of a lidar, two radars, two cameras, a roadside communication device, and a roadside laptop or computer. It covers blind spots at corners and tracks relocating obstacles, like pedestrians and automobiles, for the advantage of the autonomous shuttle that serves the campus.Shaoshan Liu
This deployment, at a campus in Beijing, consists of a lidar, two radars, two cameras, a roadside communication device, and a roadside laptop or computer. It covers blind spots at corners and tracks relocating obstacles, like pedestrians and automobiles, for the advantage of the autonomous shuttle that serves the campus.Shaoshan Liu
The infrastructure collects information on the regional natural environment and shares it promptly with vehicles, thereby doing away with blind spots and normally extending notion in apparent methods. The infrastructure also procedures data from its individual sensors and from sensors on the vehicles to extract the indicating, making what is identified as semantic information. Semantic details may well, for occasion, recognize an object as a pedestrian and identify that pedestrian on a map. The final results are then despatched to the cloud, wherever far more elaborate processing fuses that semantic facts with information from other resources to produce global notion and arranging information and facts. The cloud then dispatches world website traffic facts, navigation programs, and manage instructions to the vehicles.
Each individual auto at our examination track starts in self-driving mode—that is, a level of autonomy that today’s ideal devices can handle. Every single vehicle is geared up with 6 millimeter-wave radars for detecting and tracking objects, eight cameras for two-dimensional notion, one lidar for three-dimensional notion, and GPS and inertial direction to identify the car or truck on a digital map. The 2D- and 3D-perception final results, as perfectly as the radar outputs, are fused to generate a detailed check out of the highway and its fast environment.
Up coming, these perception benefits are fed into a module that keeps monitor of just about every detected object—say, a automobile, a bicycle, or a rolling tire—drawing a trajectory that can be fed to the following module, which predicts where by the target item will go. Lastly, this kind of predictions are handed off to the arranging and management modules, which steer the autonomous car. The automobile makes a model of its environment up to 70 meters out. All of this computation takes place inside the automobile itself.
In the meantime, the intelligent infrastructure is undertaking the similar work of detection and tracking with radars, as well as 2D modeling with cameras and 3D modeling with lidar, last but not least fusing that knowledge into a design of its individual, to complement what just about every motor vehicle is carrying out. Because the infrastructure is unfold out, it can model the environment as far out as 250 meters. The monitoring and prediction modules on the vehicles will then merge the broader and the narrower products into a in depth see.
The car’s onboard device communicates with its roadside counterpart to facilitate the fusion of details in the motor vehicle. The
wi-fi conventional, called Cellular-V2X (for “vehicle-to-X”), is not contrary to that used in phones communication can get to as much as 300 meters, and the latency—the time it can take for a concept to get through—is about 25 milliseconds. This is the stage at which numerous of the car’s blind places are now lined by the procedure on the infrastructure.
Two modes of communication are supported: LTE-V2X, a variant of the cellular common reserved for automobile-to-infrastructure exchanges, and the professional mobile networks utilizing the LTE typical and the 5G conventional. LTE-V2X is focused to direct communications concerning the road and the cars more than a array of 300 meters. While the interaction latency is just 25 ms, it is paired with a reduced bandwidth, presently about 100 kilobytes for each second.
In distinction, the professional 4G and 5G network have limitless variety and a significantly greater bandwidth (100 megabytes per 2nd for downlink and 50 MB/s uplink for business LTE). However, they have substantially increased latency, and that poses a significant obstacle for the instant-to-second choice-creating in autonomous driving.
 A roadside deployment at a community street in Suzhou is organized alongside a green pole bearing a lidar, two cameras, a conversation device, and a computer. It tremendously extends the selection and protection for the autonomous motor vehicles on the highway.Shaoshan Liu
A roadside deployment at a community street in Suzhou is organized alongside a green pole bearing a lidar, two cameras, a conversation device, and a computer. It tremendously extends the selection and protection for the autonomous motor vehicles on the highway.Shaoshan Liu
Be aware that when a car travels at a pace of 50 kilometers (31 miles) for each hour, the vehicle’s halting distance will be 35 meters when the street is dry and 41 meters when it is slick. Consequently, the 250-meter perception variety that the infrastructure permits presents the car with a huge margin of basic safety. On our exam observe, the disengagement rate—the frequency with which the protection driver need to override the automatic driving system—is at minimum 90 percent decreased when the infrastructure’s intelligence is turned on, so that it can increase the autonomous car’s onboard process.
Experiments on our test observe have taught us two factors. To start with, due to the fact visitors disorders alter in the course of the working day, the infrastructure’s computing models are completely in harness in the course of rush several hours but mostly idle in off-peak hrs. This is far more a feature than a bug because it frees up a lot of the great roadside computing power for other duties, these as optimizing the system. Second, we uncover that we can certainly enhance the technique for the reason that our increasing trove of neighborhood perception knowledge can be used to good-tune our deep-finding out designs to sharpen notion. By putting collectively idle compute power and the archive of sensory facts, we have been equipped to boost functionality with out imposing any additional burdens on the cloud.
It is really hard to get folks to concur to build a vast technique whose promised positive aspects will come only right after it has been done. To resolve this hen-and-egg trouble, we need to commence via 3 consecutive phases:
Phase 1: infrastructure-augmented autonomous driving, in which the automobiles fuse vehicle-side perception data with roadside perception information to strengthen the security of autonomous driving. Automobiles will continue to be heavily loaded with self-driving equipment.
Stage 2: infrastructure-guided autonomous driving, in which the motor vehicles can offload all the notion tasks to the infrastructure to reduce per-auto deployment expenditures. For basic safety reasons, simple perception capabilities will stay on the autonomous autos in case communication with the infrastructure goes down or the infrastructure alone fails. Vehicles will have to have notably considerably less sensing and processing components than in stage 1.
Phase 3: infrastructure-prepared autonomous driving, in which the infrastructure is billed with equally perception and preparing, thus attaining highest security, targeted visitors effectiveness, and charge savings. In this stage, the autos are equipped with only really basic sensing and computing capabilities.
Complex difficulties do exist. The initially is community stability. At superior automobile pace, the approach of fusing automobile-facet and infrastructure-aspect facts is really delicate to community jitters. Using commercial 4G and 5G networks, we have observed
community jitters ranging from 3 to 100 ms, sufficient to effectively avert the infrastructure from aiding the motor vehicle. Even far more important is protection: We have to have to ensure that a hacker cannot attack the communication network or even the infrastructure alone to go incorrect information and facts to the vehicles, with perhaps lethal outcomes.
One more challenge is how to obtain common help for autonomous driving of any type, let on your own one based on intelligent roadways. In China, 74 % of folks surveyed favor the fast introduction of automatic driving, whilst in other nations, community assist is much more hesitant. Only 33 percent of Germans and 31 p.c of people in the United States help the swift growth of autonomous cars. Most likely the perfectly-established vehicle tradition in these two international locations has manufactured men and women more attached to driving their very own cars.
Then there is the challenge of jurisdictional conflicts. In the United States, for occasion, authority about roads is distributed among the Federal Freeway Administration, which operates interstate highways, and point out and nearby governments, which have authority in excess of other roadways. It is not generally clear which amount of govt is liable for authorizing, managing, and paying for upgrading the present infrastructure to sensible roadways. In new situations, a lot of the transportation innovation that has taken place in the United States has transpired at the regional stage.
By contrast,
China has mapped out a new set of measures to bolster the investigation and growth of essential technologies for intelligent street infrastructure. A policy document printed by the Chinese Ministry of Transportation aims for cooperative systems between car and street infrastructure by 2025. The Chinese govt intends to include into new infrastructure this kind of intelligent components as sensing networks, communications techniques, and cloud management systems. Cooperation amid carmakers, higher-tech businesses, and telecommunications company suppliers has spawned autonomous driving startups in Beijing, Shanghai, and Changsha, a city of 8 million in Hunan province.
An infrastructure-motor vehicle cooperative driving tactic promises to be safer, additional productive, and much more economical than a strictly car-only autonomous-driving method. The technologies is below, and it is staying implemented in China. To do the identical in the United States and elsewhere, policymakers and the community need to embrace the strategy and give up today’s product of automobile-only autonomous driving. In any situation, we will shortly see these two vastly diverse approaches to automatic driving competing in the entire world transportation sector.
From Your Web site Articles
Linked Article content All-around the Web


